다익스트라 최단 경로 (Dijkstra Algorithm)
다익스트라 최단 경로 (Dijkstra)
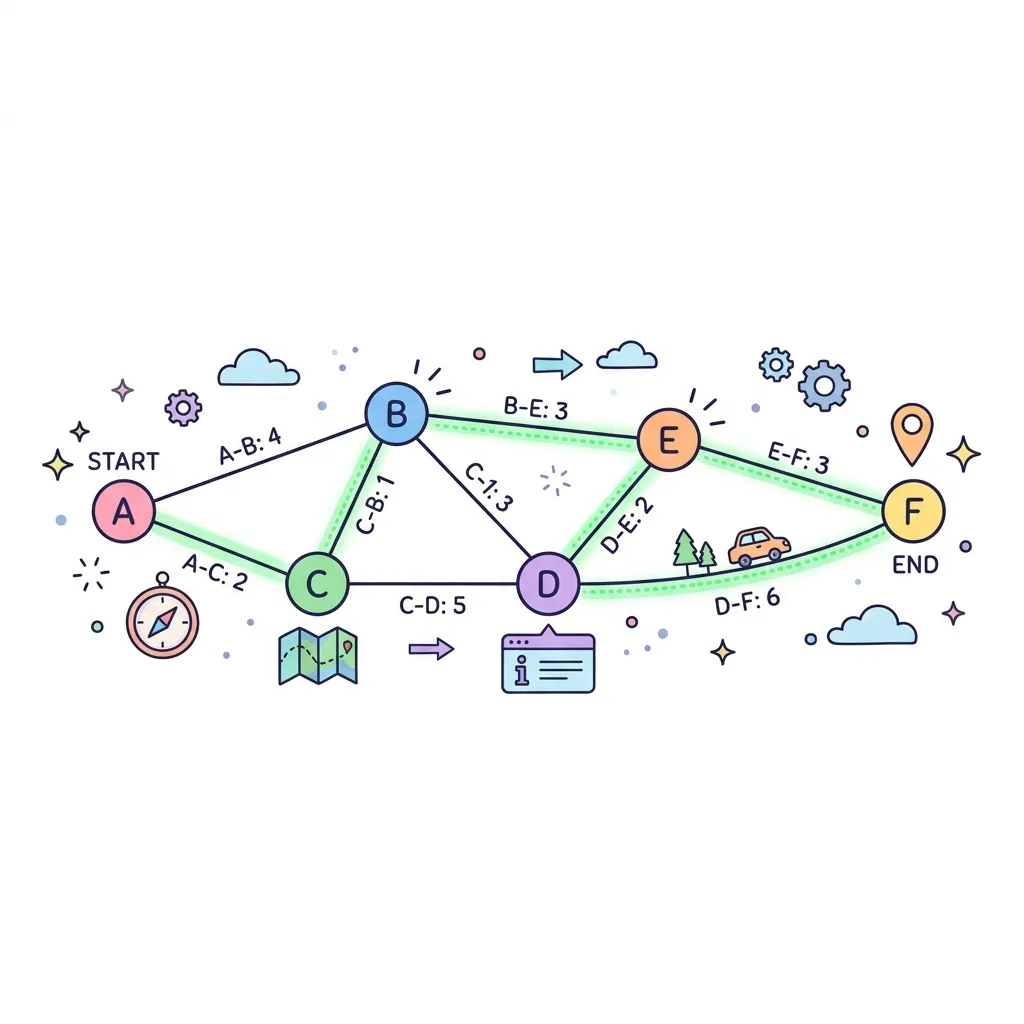
다익스트라 알고리즘(Dijkstra)은 다이나믹 프로그래밍(DP)과 그리디(Greedy) 알고리즘 기법을 결합하여 특정 출발 노드에서 다른 모든 노드까지의 '가장 짧은 경로(최소 비용)'를 완벽하게 찾아내는 알고리즘입니다. 오늘날 GPS 내비게이션 길 찾기 기능의 근간이 되는 아주 강력하고 대표적인 라우팅 기법입니다.
1. 다익스트라의 작동 원리와 특징
다익스트라는 매 순간 '가장 가까운 노드'를 선택하며 거리를 갱신합니다(Relaxation).
● 우선순위 큐(Priority Queue) : 단순히 배열을 돌며 가장 짧은 거리를 찾으면 O(V²)이 걸리지만, 우선순위 큐(최소 힙)를 사용하면 O(E log V)로 속도가 비약적으로 상승합니다.
● 거리 갱신 (Relaxation) : 현재 노드를 거쳐서 특정 노드로 가는 비용이, 기존에 알고 있던 비용보다 저렴하다면 최소 비용을 갱신합니다.
● 한계점 (음수 간선) : 음수 가중치(비용이 마이너스)를 가진 간선이 존재한다면 알고리즘이 고장납니다. 이 경우 벨만-포드(Bellman-Ford) 알고리즘을 사용해야 합니다.
2. 시간 및 공간 복잡도 분석
| 구현 방식 | 시간 복잡도 | 심층 설명 |
|---|---|---|
| 순차 탐색 (선형 탐색) | O(V²) | 매번 방문하지 않은 노드 중에서 '가장 최단 거리가 짧은 노드'를 찾기 위해 모든 노드를 스캔합니다. 노드(V)가 10,000개 이하라면 쓸만하지만 그 이상이면 병목이 옵니다. |
| 우선순위 큐 (최소 힙) | O(E log V) | 최단 거리를 가진 노드를 즉각적으로 뽑아내는 최소 힙(Min-Heap)을 사용하면, 노드가 100만 개 단위인 거대한 그래프 처리도 순식간에 끝냅니다. |
💡 실무 지식: 자바스크립트에서의 다익스트라 구현
Java(PriorityQueue)나 Python(heapq), C++(std::priority_queue)는 우선순위 큐를 표준 라이브러리로 강력하게 지원하지만, 안타깝게도 JavaScript/TypeScript는 내장된 우선순위 큐(Priority Queue) 자료구조가 없습니다. 실무 알고리즘 테스트 시에는 직접 Min-Heap 클래스를 구현해서 풀거나, 데이터가 크지 않다면 단순 배열 선형 탐색 O(V²)으로 빠르게 제출하는 것이 현실적인 전략입니다.